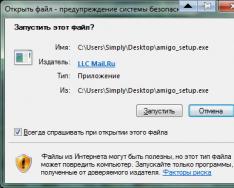
Наша команда давно хотела использовать недорогие ARM материнские платы с linux, но их доступность и поддержка производителей не позволяла строить наши решения на них. С выходом Raspberry Pi многое изменилось. Теперь с платой поставляется полноценный linux - существует несколько вариантов дистрибутивов на выбор, большое сообщество пользователей. Единственным огорчением является доступность платы: поставки устройства в Россию постоянно затягиваются, и если вы хотите получить желанную плату быстро - вам придется заплатить приличную сумму перекупщикам. Мне досталась плата модификации B с двумя USB и Ethernet. Рекомендую брать именно ее. Также производитель заявил о более дешевой модификации A без Ethernet и с одним USB.
1) Подключение
Плата серии В имеет 3 USB разъема, однако третий имеет форм-фактор micro и предназначен только для питания платы. Потребление платы может достигать 700мА и не факт, что будучи подключенной напрямую в порт вашего компьютера, плата будет работать (напомню, что согласно старому стандарту, потребление устройства USB не должно превышать 500мА, по новому – 900 мА). У нас плата работала, будучи подключенной к ноутбуку, к телевизору и к USB хабу, проблем не было. Остальные два разъема USB хоть и поддерживают стандарт 2.0, но электрически его не соблюдают. По наблюдениям, максимальное потребление на них составляет 140 мА, вы не сможете подключить напрямую жесткий диск и большинство web-камер. И это далеко не всё. Из-за множества косяков подобного рода и кривым драйверам на этой плате можно использовать только ограниченное число железок. Подробно с ними можно ознакомиться по этой ссылке .

Для старта платы иметь на руках необходимо иметь следующее:
- кабель micro-USB
- SD- карта 6-10 класса (мы использовали карту производства Transcend, также работает Silicon Power, но хуже). Не все карты будут работать в этой плате. И это связано с кривым драйвером SD-карточки и с тем, что производители переходят на более дешевые технологии изготовления. Из-за этого меняются временные параметры сигналов и карты перестают работать. Объем – до 32 Гб.
- USB-hub. Подойдет не любой. Работать будет практически с любым, но будет следующая проблема: у платы нет защиты от обратных токов со стороны USB hub, это означает, что если вы не включите плату через micro USB, но часть устройств подключите по USB hub с внешним питанием, то плата может запуститься, при этом на нее будет подано низкое напряжение. В итоге вы можете убить содержимое SD-карты, так как при данном напряжении загрузчик будет исполняться криво и может повредить данные. Плата после этого может не запуститься и вам придется создавать новый образ ОС и зашивать его на карту. Поэтому советую всегда иметь запасную карту. Подходящие хабы с внешним питанием также описаны на Wiki проекта . Без них нормально подключить wi-fi, web-камеры, USB HDD не получится.
- USB клавиатуру и мышь. Очень советую, чтобы они были новые и одного стандарта (например USB 2.0 или 1.1). Драйвер для USB на этой плате кривой и часто можно получить случай, когда при втыкании мыши и клавиатуры, работает что-то одно. Отзывы на сайте указывают на проблему драйвера.
- источник питания. Если плата не завелась от порта USB вашего компьютера, то можно обойтись и без USB хаба с внешним питанием, для этого вам придется купить блок питания для зарядки или питания usb устройств. Подробнее про это можно узнать на сайте проекта.
2) Установка Linux
 |
 |
 |
 |
Отдельного внимания заслуживает концепт корпуса для Raspberry. К сожалению, для него нет 3д модели STL для печати. Но был найден в инете . Юзеры Solidworks могут попробовать его доработать для 3д печати.

Совет пользователям SolidWorks: не стоит думать, что детали в формате STL нельзя распознать. Для этого в меню открытие после выбора формата STL надо выбрать "Параметры" и выбрать тип детали ("твердое тело" или "поверхности"). Тогда STL будет распознана в виде, пригодном для небольшого редактирования.
Этот проект уникален и несмотря на нынешние недоработки, буквально через несколько месяцев бурное сообщество пользователей укажет на основные ошибки и поможет их исправить. Я же советую напоследок внимательно всегда читать документацию на сайте проекта и использовать только проверенное там железо. Согласитесь, за стоимость 2000-3000 руб. можно смириться с недостатками, которые к тому же постоянно исправляются, делая эту плату чуть ли не единственной нормально поддерживаемой ARM Linux платформой.
Хочу познакомить вас с одной вполне интересной разработкой - самодельным экспериментальным роботом, которого я назвал "Zer0". Эта статья является первой из цикла статей по самостоятельному изготовлению робота на основе Raspberry Pi, который будет управляться могущественной связкой Linux + Python.
Постараюсь детализировано описать весь процесс подготовки и изготовления каждой части робота, проведу различные эксперименты с железом и программным обеспечением, поделюсь полезными и интересными идеями по применению данного робота для обучения, развлечений и автоматизации различных задач.
Подготовка
Так сложилось, что я получил в подарок несколько маленьких электродвигателей со встроенными редукторами от какого-то медицинского аппарата для штучного дыхания - шестеренки металлические, хорошее передаточное число, жаль только что корпус из пластика, но думаю что он все нормально выдержит. Еще немного раньше я заполучил набор неплохих колес из резины с шипами от какой-то радиоуправляемой игрушечной машинки.
Малинка (Raspberry Pi 2B) у меня уже была в наличии, поэтому прикупив парочку Ni-MH аккумуляторов по 6В/6А*ч (позже купил еще один на 12В/2,3А*ч) окончательно решил что вполне можно собирать небольшого робота для обучения, экспериментов, развлечений и не только...
Рис. 1. Набор деталей, которые дали начало самодельному роботу.
Поскольку двигатели оказались на рабочее напряжение +24В, а для питания малинки нужно +5В, то пришлось заказать несколько понижающих и повышающих DC-DC преобразователей на микросхемах LM2596 и XL6009.
Основой шасси для робота будет служить доска из дерева средней плотности, она легкая и на нее удобно крепить все детали при помощи маленьких шурупов-саморезов.
Ходовую часть решил делать трехколесную: два ведущих колеса спереди от игрушечной машинки и одно колесико - сзади, которое будет следовать направлению ведущих. Можно сделать ходовую часть и на 4 колеса, 2 из которых ведущие или же все 4, это уже дело вкуса и запчастей в наличии.
Заднее колесико с подшипником можно купить в мебельном магазине или же на базаре. Мне же просто повезло найти его у себя в кладовке, оно оказалось очень добротным, основа изготовлена из металла - похоже что от какого-то старого крепкого кресла.
Ведущие колеса для будущего робота можно извлечь из игрушечной машинки - новой или поломанной. Вот вам идея на заметку: поспрашивайте на базаре у продавцов игрушек нет ли у них на складе поломанных машинок с колесами и прочих электронных игрушек, такое добро скорее всего согласятся продать за копейки - будет польза и вам и продавцу, поскольку ему остается его или выбросить или кому-то подарить на окончательное уничтожение "маленькими исследователями".))
Все дополнительные детали шасси и элементы крепления должны быть легкими, поэтому для их изготовления лучше применять легковесные сплавы и материалы из алюминия.
Обо всем этом и многом другом я подробно расскажу в следующих статьях. А теперь давайте просто рассмотрим что в итоге получилось и как это можно использовать.
Из чего состоит робот
Основные составные части и возможности экспериментального робота Zer0:
- Мозг робота - Raspberry Pi + Raspbian Linux;
- Питание - аккумулятор на 12В/2,3А*ч + контроллер на ATtiny2313 + DC-DC преобразователи;
- Перемещение - два электродвигателя на +24В с редукторами + модуль L298;
- Воспроизведение звука - два широкополосных динамика 2x3 Вт/8 Ом + усилитель на TDA1517P;
- Захват видео/фото/звук - Webcam Logitech C270 HD, 1280 x 720 пикселей + микрофон;
- Управление углом обзора - два сервопривода S05NF;
- Освещение - 6 ярких светодиодов + отражатель с фокусировкой;
- Отображение информации - OLED дисплей 128x64 пикселя;
- Связь - USB Wi-Fi + USB 3G
- Другие возможности - пиродатчик, газовый анализатор воздуха, датчик температуры и влажности воздуха, 3-х осевой компас, ультразвуковой датчик препятствий, датчик освещения, мониторинг напряжения батареи питания, часы реального времени, 2-3 свободных USB порта для подключения разных устройств.
Все приведенные выше составляющие позволяют получить достаточно богатый и разнообразный набор функционала как для такой небольшой конструкции. Размеры и вес робота можно уменьшить еще больше если бы использовать батареи Li-Ion или Li-Pol, а также купив более миниатюрные микроэлектродвигатели с редукторами.
Я же отдал предпочтение батареи Ni-MH потому что она безопасна, недорога и проста в обслуживании, хорошо подходит для беспрерывного питания устройств с постоянной подзарядкой.
Для управления питанием был изготовлен несложный самодельный контроллер на основе ATtiny2313 + электронные ключи на полевых транзисторах. Благодаря ему робот умеет находиться в ждущем режиме (включение по кнопке), выполнять безопасное выключение компьютера с последующим полным отключением питания в случае подачи команды от Raspberry Pi или с кнопки.
Самая дорогая деталь в конструкции робота - это одноплатный мини-компьютер Raspberry Pi. Немного уменьшить его стоимость можно если купить к нему более простой корпус или же вообще изготовить корпус самостоятельно. Отказываться от корпуса для компьютера я бы не севетовал, поскольку он защищает плату компьютера от различного рода внешних воздействий.
Знакомьтесь: Zer0!
Zer0 - это самодельный работ, собранный на основе Raspberry Pi, который управляется операционной системой Linux (Raspbian). Название "Zer0" пришло в голову как-то сразу, это как начальная модель 0-й версии.
Ниже привожу несколько фотографий готового робота (все рисунки кликабельны) и описания к ним:

Рис. 2. Самодельный робот Zer0 на Raspberry Pi и Linux - фронтальный вид.
Спереди у робота располагаются два ведущих колеса, с левой стороны мы видим часть компьютера, по середине расположен ультразвуковой датчик препятствий, платка с различными датчиками (с правой стороны), а также голова.
Голова робота содержит HD веб-камеру со встроенным микрофоном, маленький монохромный OLED-дисплей, пиродатчик, а также небольшой фонарик для освещения того на что голова смотрит если очень темно. Для поворота головы в разные стороны, а также для наклонов вперед и назад используются два маленьких но мощных сервопривода.

Рис. 3. Самодельный робот Zer0 на Raspberry Pi и Linux - вид сзади.
Сзади в нижней части у робота прикреплено колесико с подшипником, в верхней части располагается панель управления питанием. На панели питания размещены клеммы для зарядки аккумулятора и для подачи внешнего питания для робота. Также из этих клемм можно снять 12В для питания чего-либо.
Еще на панели питания рамещен небольшой переключатель-замочек под ключик (как в старых компьютерах) для подачи питания на робота, кнопка включения и выключения, а также большая желтая кнопка с фиксацией, которую можно использовать на свое усмотрение, запрограммировав для нее какое-то событие или режим работы.

Рис. 4. Самодельный робот Zer0 - вид с боковой стороны где размещен компьютер Raspberry Pi.
С левой стороны у робота находится компьютер, по сути для него отведена вся левая сторона. Здесь мы имеем удобный доступ ко всем разъемам и пинам GPIO, которые размещены на малинке. С передней части у нас есть доступ к Micro-SD карточке компьютера.
Также сзади за компьютером есть небольшая свободная площадка для удобного подключения и размещения различных Flash-накопителей, USB Wi-Fi, 3G-адаптеров и для подключения сетевого Ethernet-шнура в случае необходимости.

Рис. 5. Робот Zer0 - вид со стороны где размещены датчики, контроллер движков и система питания.
С правой боковой стороны у робота размещены: платка с набором датчиков, модуль управления электродвигателями на основе L298 + платка для конвертации сигналов на К561ЛА7, DC-DC преобразователи напряжения на +5В и +24В, плата контроллера питания на ATtiny2313 + ключи на полевых транзисторах и радиатор к ним, панель управления питанием.

Рис. 6. Робот Zer0 - вид снизу на движки, акустические колонки и колесико с подшипником.
Снизу у робота прикреплены движки с колесами, а также колесо с подшипником, которое будет следовать направлению движения робота. Еще у нас здесь располагается очень важный отсек - две акустические колонки с широкополосными динамиками по 3Вт, которые собраны в одном корпусе из фанеры с внутренней перегородкой.
Идеи по применению робота
Приведу несколько идей по использованию робота:
- Периодические задачи на автомате, оповещение о наличии новой почты, комментариях на сайтах, курсах валют, погоде...о чем угодно (синтезатор речи + информация на дисплее). У многих есть каждодневные задачи, которые приходится выполнять вручную, это все можно запрограммировать и поручить роботу, настроив при этом время, условия и периодичность оповещений;
- Эксперименты с искусственным интеллектом, нейросетями, логикой . Мощности 2-й и 3-й версии малинки уже хватит для некоторых вещей в этой сфере;
- Платформа для обучения и работы с OpenCV (Open Computer Vision). Анализ информации с фото и видео для принятия каких-то решений, например распознавание лиц у людей, детектор наличия и перемещения каких-то предметов;
- Сигнализация об утечке воды в помещении, появления вредных веществ (газов) в воздухе . Суть идеи проста: робот установлен (или же перемещается) в помещении и периодически измеряет уровень влажности воздуха, анализирует наличие паров вредных веществ и газа в воздухе. В случае отклонений от нормы можно подать звуковой сигнал, отправить куда-то письмо или СМС...;
- Напоминалка о том что нужно полить вазоны и/или проветрить помещение (анализ температуры, влажности и качества воздуха). Часто бывает что люди находясь в помещении привыкают и перестают замечать что по сути там уже нечем дышать, начинает болеть голова, появляется вялость и куда-то пропадают все силы - причиной может быть плохая проветриваемость помещения, низкая влажность воздуха из-за включенного на обогрев кондиционера или обогревателя, жаждущих полива растений и т.п. Можно запрограммировать робота на выполнение периодического контроля качества и влажности воздуха в помещении, с последующем оповещением, например: "откройте окно и освободите помещение на Х минут для его проветривания";
- Удаленный просмотр и мониторинг помещений (интернет через Wi-FI/3G + управление движением + веб-камера). Полезная штука если на некоторое время нужно куда-то уехать, а дома некому остаться, можно будет удаленно увидеть состояние комнат и всего дома, убедиться что все на своем месте;
- Система интерактивной охраны для квартиры или дома (фото + видео + перемещение + звуковой оповещение, сигнализация). Динамические и статические маршруты перемещения с автокорректировкой + логирование событий и значений с датчиков, запись видео и фото, отправка информации на почту или личный удаленный сервер в интернете;
- "Скайп на колесах" (камера + звук + микрофон + перемещение). Возможность общаться и при этом перемещать камеру, меняя позицию и угол обзора удаленно. Возможно вы видели как Эдвард Сноуден удаленно (без физического присутствия) выступал на конференциях TED 2014 (Ванкувер) и CES 2016 в Лас-Вегасе используя робота, которого в сети назвали как "Сноубот"? - в моем случае получится почти то же самое, за исключением наличия большого дисплея на котором смогут видеть того кто "за роботом". Тем не менее, к роботу можно подключить дисплей на 4-7 дюймов используя HDMI выход;
- Подбор и воспроизведение музыки (голосовые команды + удаленное управление). Можно воспроизводить музыку под настроение, отдавая простые голосовые команды или же просто по хлопкам. Также запрограммировав робота можно включать музыку или какое-то звуковое приветствие при срабатывании пиродатчика если кто-то вошел в помещение;
- Управление электроприборами в квартире или доме (через радиомодуль). Здесь нужна доработка: передатчик на 433МГц встраиваем в робот, приемники с "умными" электронными реле подключаем к каждому устройству для управления их питанием и/или режимами;
- Развлечение для детишек (перемещение + камера + звук + свет + удаленное управление). В робота можно заложить какую-то программу и научить его реагировать на какие-то голосовые команды, а также самому управлять и разговаривать через него удаленно... детишки будут в восторге;
- Источник питания с напряжением 12В и током 4А (стоит предохранитель). В тыловой части робота установлена панель управления питанием с двумя клеммами на которых постоянно присутствует напряжение +12В даже если робот выключен, также через них сейчас выполняется заряд аккумулятора. Вполне можно использовать как источник питания для каких-то самоделок и экспериментов не покупая при этом дополнительного аккумулятора или БП;
- и т.д. и т.п. .... придумайте сами:) .
Скомбинировав некоторые из приведенных выше идей можно получить достаточно функциональное устройство, которое может принести не мало пользы вам и вашим близким.
Важно заметить что подключая такого робота на постоянной основе к сети интернет нужно очень тщательно продумать все аспекты в плане сетевой безопасности и шифрования данных, чтобы не допустить получения доступа к инструментам робота и информации на нем посторонним лицам. Об этом я как-то расскажу в отдельной статье по программному обеспечению для робота.
В заключение
В следующей статье я подробно расскажу о изготовлении шасси для робота, креплении движков и колес, поделюсь полезными замечаниями и идеями.
Другие мои статьи по самодельному роботу Zer0:
- Изготовление платформы для самодельного робота (шасси, двигатели, акустика, УНЧ на TDA1517)
Желаю вам творческих успехов и побольше позитива во всех ваших начинаниях!
Если уже имеются некоторые навыки работы с Raspberry PI 3 то можно попробовать сделать простейшего робота который будет передавать изображение с камеры на компьютер и выполнять посылаемые ему команды, например робот имеет возможность перемещаться в пространстве на своих колёсах и будет некоторое количество команд для управления двигателями. Raspberry PI 3 имеет встроенный WIFI модуль скорости передачи информации которого достаточно для передачи качественного изображения, однако этого не всегда получается добиться но всё же передача хоть какого то видео для начала - это уже хорошо (см. Raspberry pi камера). Если проблема с передачей видео решена то можно приступить к решению проблемы управления двигателями. У Raspberry Pi имеются выводы общего назначения которыми можно управлять через скрипты на языке "питон" (см. http://electe.blogspot.ru/2016/05/raspberry-pi-3-gpio-wifi.html) но такой способ управления не очень удобен. Для решения этой проблемы можно реализовать управление выводами через веб интерфейс, для этого на Raspberry pi нужно установить какой либо веб сервер например lighttpd или apache и интерпретатор языка php, ещё понадобиться установить wiringpi, после чего можно будет написать простой код с html тэгами и вставками php и javascript скриптов необходимых для реализации удобного управления двигателями. Веб сервер lighttpd занимает меньше места в памяти и работает быстрее чем apache но apache более популярен и распространён, поэтому если возникнет какая либо проблема (например с его установкой) то её можно будет проще решить спросив ответ у знающих людей. Установить apache и php можно по инструкции на странице https://www.raspberrypi.org/documentation/remote-access/web-server/apache.md . Перед выполнением инструкций надо выполнить команду
Sudo apt-get update
(о том как отправлять команды на Raspberry pi 3 смотрите на странице http://electe.blogspot.ru/2016/05/raspberry-pi-3-gpio-wifi.html) Дальше будут всего две обязательные команды:
Sudo apt-get install apache2 -y
Sudo apt-get install php5 libapache2-mod-php5 -y
После успешного выполнения которых Raspberry pi "превращается" в сервер.
Далее необходимо установить wiringpi, если он не установлен. В полной версии Raspbian, как правило, wiringpi уже присутствует. Для того чтобы проверит наличие wiringpi нужно ввести команду
Если после ввода этой команды появиться таблица с состоянием выводов то это значит что wiringpi уже установлен, Если такой таблицы не появилось то wiringpi можно установить по инструкциям с сайта https://thedrhax.pw/?p=1460 . Далее можно прямо в терминале писать команды ля управления выводами, например командой
Gpio mode 21 out
Мы переводим вывод gpio 5 raspberry pi в режим выхода,
командой
Gpio write 21 1
Мы выводим лог. 1 на вывод gpio 5 raspberry pi.
Почему пишется 21 а выводится на 5? Это можно увидеть если ввести команду
И в появившейся таблице будет данное соответствие.
Двигатели можно подключить через драйверы например как на схеме:
Рисунок 1 - Подключение драйверов и двигателей к Raspberry pi 3
Вместо L6203 можно использовать какие либо другие драйверы но достаточно мощные двигатели подключать лучше к таким. Для упрощения сборки в схеме отсутствует резистор с сопротивлением 0.1 Ом между выводом 10 и землёй но при желании его можно поставить, по нему драйвер будет определять ток и в случае необходимости отключиться чтобы не перегореть (очень хорошая вещь, советую поставить, у меня просто не было такого резистора). Так же желательно поставить предохранитель по питанию.
Далее надо удалить файл index.html командой:
Rm /var/www/html/index.html
И создать новый
Sudo nano /var/www/html/index.php
В который вставить этот код . После чего сохранить нажатием CTRL+O и ENTER и выйти нажатиtм CTRL+X.
В строке
System("gpio write 25 0");
Происходит установка на выводе 26 напряжения логического нуля. Вместо этого можно написать например
Exec("gpio write 25 0");
В общем через system и exec можно выполнять в php те команды которые выполняются в консоли кроме тех что идут с sudo в начале, т.е. например если написать exec("sudo halt"); то Raspberry pi не выключиться.
В строке
Xhr.open("GET", "http://192.168.1.252/?act=1", true); xhr.send();
И ей подобных, вместо 192.168.1.252 надо поставить ip адрес вашего Raspberry PI
Тест драйв и некоторую дополнительную информацию можно посмотреть в видео
Программа обмена текстовыми сообщениями Google Talk обычно используется для общения между людьми. Тем не менее, технология, лежащая в её основе удобна для реализации программных роботов. Интернет-боты, они же веб-роботы, WWW роботы или просто «боты» также могут использовать эту технологию для исполнения автоматических функций с помощью интернета. Существует масса подобных ботов, предоставляющих различные службы, начиная от шуточных ([email protected]) до сокращения URL ([email protected]) и даже математических вычислений ([email protected]). Подключение к подобным ботам не является сложной задачей, достаточно добавить адрес бота в ваши контакты. Затем, при необходимости, отправьте боту текстовую команду и он пришлёт в ответ требуемую информацию.
Бот Raspi похож на всех остальных интернет ботов. Для его настройки необходимо иметь отдельный адрес электронной почты, связанный с учетной записью Google Talk. Этот адрес должны будут добавить себе в контакты все желающие управлять ботом. Затем, как только будет запущен скрипт бота, он подключится к службе чата Google и появится среди ваших друзей в списке контактов.
Программное обеспечение бота представляет собой клиента протокола XMPP, написанного на языке Python. При запуске, скрипт подключается под своими учетными данными к службе Google Talk. Скрипт на языке Python является развитием проекта pygtalkrobot - открытого проекта бота gtalk (google talk) с использованием библиотек XMPPPY и PyDNS, а также с использованием кода проекта python-jabberbot.
Программное обеспечение
Бот требует наличия дополнительных модулей Python. Проще всего установить их с помощью менеджера пакетов pip. Если он не установлен, вы можете установить его с помощью apt-get:
Sudo apt-get install python-pip git-core python2.7-dev
Затем обновите индекс easy_install:
Sudo easy_install -U distribute
и установите модули GPIO, xmpppy и pydns:
Sudo pip install RPi.GPIO xmpppy pydns
Затем скопируйте мой репозиторий с исходниками робота Raspi Gtalk:
Git clone https://github.com/mitchtech/raspi_gtalk_robot.git
Теперь смените рабочий каталог:
Наконец, укажите имя пользователя и пароль в службе Google для своего робота. Это можно сделать с помощью полей BOT_GTALK_USER, BOT_GTALK_PASS, и BOT_ADMIN в строках с 31 по 33 файла raspiBot.py. Рекомендуется (но не является необходимым) создать для робота свою собственную учетную запись в службах Google. Кроме того, поскольку доступ к шине GPIO на компьютере Raspberry Pi предоставляется только суперпользователю, запускать робота необходимо с помощью команды sudo:
Sudo python ./raspiBot.py
Скрипт, предлагаемый в качестве образца, понимает следующие команды:
: включает указанный выход GPIO
: отключает указанный выход GPIO
: устанавливает указанное состояние указанному выходу
: считывает состояние указанного выхода GPIO
: определяет состояние подключения google talk и статусное сообщение в соответствии с аргументом
: выполняет команду оболочки, указанную в аргументе после слова «shell» или «bash»
Например, сообщение «pinon 10» даст команду включить 10-й выход GPIO, сообщение «read 8» даст команду считать текущее состояние 8-го входа GPIO, наконец сообщение «bash ps» запустит на выполнение команду оболочки «ps».
Железо
Конфигурация, показанная в видеоролике, включает в себя двухпозиционный переключатель, подключенный к входу 8 GPIO, а также светодиод, подключенный к 10-му выходу GPIO. Вот подробная схема подключения (схема сделана с помощью Fritzing):
Пример использования №1. Домашняя автоматизация
Одним из самых очевидных способов использования данной технологии является, конечно же, домашняя автоматизация. Робот Raspberry Pi доступен откуда угодно при помощи Google Talk, что на мой взгляд означает - доступен почти с любого устройства. Отправляйте сообщения роботу для включения или отключения света в доме, а также управления другими электроприборами.
Также, возможно использовать робота для мгновенного уведомления о проникновении в дом. Робот может быть оснащен дополнительными охранными датчиками, такими как инфракрасный датчик движения, либо ультразвуковой датчик объема. Если любой из датчиков отмечает какое либо изменение обстановки, вы моментально получите сообщение от робота.
Пример использования №2. Удаленный доступ
Робот Raspberry Pi может быть использован в качестве устройства удаленного доступа. В этой конфигурации, каждое сообщение, отправленное роботу будет обработано как команда операционной системы, результаты работы которой будут доставлены обратно пользователю в виде ответного сообщения. Конечно, такое устройство создает проблемы безопасности. Для защиты от несанкционированного доступа, робот отвечает только на сообщения Google talk от пользователя, указанного как администратор. По умолчанию, сообщения от остальных пользователей будут игнорироваться.
Вот небольшой список относительно безопасных команд, которые можно запускать удаленно с помощью робота Raspberry Pi:
vmstat
- отображает активность системы, оборудования и прочую информацию
uptime
- время непрерывной работы системы
w
- показывает подключенного пользователя и его активный процесс
ps
- выдает список запущенных процессов
free
- объем свободной физической и виртуальной памяти
Конечно, перехват некоторого количества системной информации может рассматриваться как серьезная брешь в безопасности. Для тех, кто заботится о безопасности меньше, чем об удобстве работы, могут быть полезны некоторые дополнительные команды и скрипты, а также передача отдельных личных данных.
Пример использования №3. Удаленная перезагрузка
Еще одна проблема, которая может быть решена с помощью робота на Raspberry Pi - это перезагрузка зависших компьютеров. Многие из нас попадали в такую ситуацию, когда необходимо получить удаленный доступ к компьютеру, который не отвечает на внешние запросы. В этом случае, приходится совершать поездку до места физического нахождения компьютера для того, чтобы нажать «большую красную кнопку» и вызвать перезагрузку этого компьютера. Подобных ситуаций легко можно избежать, используя робота на основе Raspberry Pi в качестве агента удаленной перезагрузки. Этой цели можно достигнуть, используя систему реле цепей питания, управляемых нашим роботом. В случае, когда любой из компьютеров, управляемых роботом, перестает отвечать на внешние запросы, достаточно просто отправить соответствующую команду в виде сообщения Google talk для размыкания заданного реле и перезагрузки повисшего компьютера. Ниже возможная схема включения:

Робот автомобиль с управлением raspberry pi 3 каждый ребенок захочет иметь у себя в коллекции. Снимает видео и делает фото по управлению с телефона (andriod) или с вашего персонального компьютера. Отличный комплект с учебными пособиями для того, кто делает первые шаги в робототехнике.

- Полный комплект учебных материалов на основе Raspberry Pi с Android App. для улучшения обучения, подробно написанное руководство пользователя, код с объяснением и схемы предоставляются.
- Raspberry Pi д используется в качестве контроллера. комплект использует (step-down DC-DC) пониженный преобразователь модуль для уменьшения входного напряжения и водитель мотора модуль с L298N. Также веб-камера поставляется с USB Wi-Fi адаптер, так что вы можете проверить видео в режиме реального времени на ваш КОМПЬЮТЕР или мобильный телефон.
- На ПК вы можете контролировать автомобиль двигаться вперед/назад и повернуть влево/вправо, а также управлять камерой, чтобы повернуть вертикально и горизонтально, чтобы захватить изображения в разных направлениях.
- Отличный комплект для вас, чтобы начать изучать Raspberry Pi (как код и приложения), узнать об основных компонентов и модулей в электронике, а затем использовать знания, полученные для изучения более широкого поля!
- рабочее Напряжение: 7 В-12 В; питается от двух 18650 литиевых аккумуляторных батарей
- Предоставлено несколько частей, инструкции и код, необходимый, так что вы можете собрать их самостоятельно, с помощью руководства пользователя и, следовательно, enjoy the fun of making!
- Автомобиль управления может быть реализована на ПК с Linux системы, или вы также можете применять его в Linux виртуальной машины.
- Камера в этом комплекте MJPG применяется для захвата изображения и передачи видео в режиме реального времени. вы можете просматривать видео, веб-браузер на любом устройстве. Firefox и Google Chrome рекомендуется.

1 упак. х Акриловых пластин
1 упак. х Резьбового крепежа
1 х Башня Pro SG90 Micro Servo
2 х Передач Редуктор
2 х Ведомого колеса
2 х Active wheel
1 х 16-канальный 12-битный ШИМ драйвер
1 х L298N DC Motor Driver Модуль
1 х Шаг вниз DC-DC Преобразователь Модуль
1 х USB Wi-Fi Адаптер
1 х USB Камера
1 х Dual 18650 держатель батареи
1 х Лента
1 х USB Кабель
сервала Провода Dupont
1 х Отвертка
1 x Крест Торцевых ключей
Отдельно нужно приобрести:
1х raspberry pi 3
2×18650 Литий-Ионная Аккумуляторная Батарея (3.7 В) без защитной схемной платой
1 x TF-карты